AGRICULTURE
Attitude provides information about an object's orientation with respect to the local level frame (horizontal plane) and true north. GNSS attitude solutions typically consist of three components: roll, pitch and yaw.
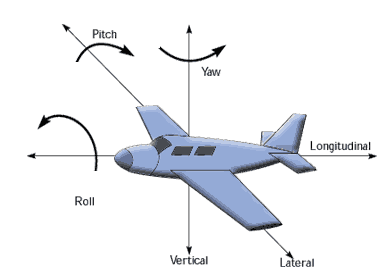
The easiest way to understand what we mean by attitude is to consider a plane with three linear axis running through it:
Angular measurement on the horizontal plane, with respect to true north, is referred to as yaw. Yaw is also known as azimuth or heading. The angular measurement on the vertical plane, with respect to the local level frame, is computed as pitch or roll.
Attitude measurements are important for precise positioning in many applications including:
Mobile Mapping
Airborne Reconnaissance
Helicopter navigation
Motion compensation applications
Real Time GPS or GNSS Attitude Determination:
Real Time GPS/INS or GNSS/INS Attitude Determination:
Post-processed Attitude Solutions:
When choosing an attitude solution, consider the following needs of your application: