AGRICULTURE
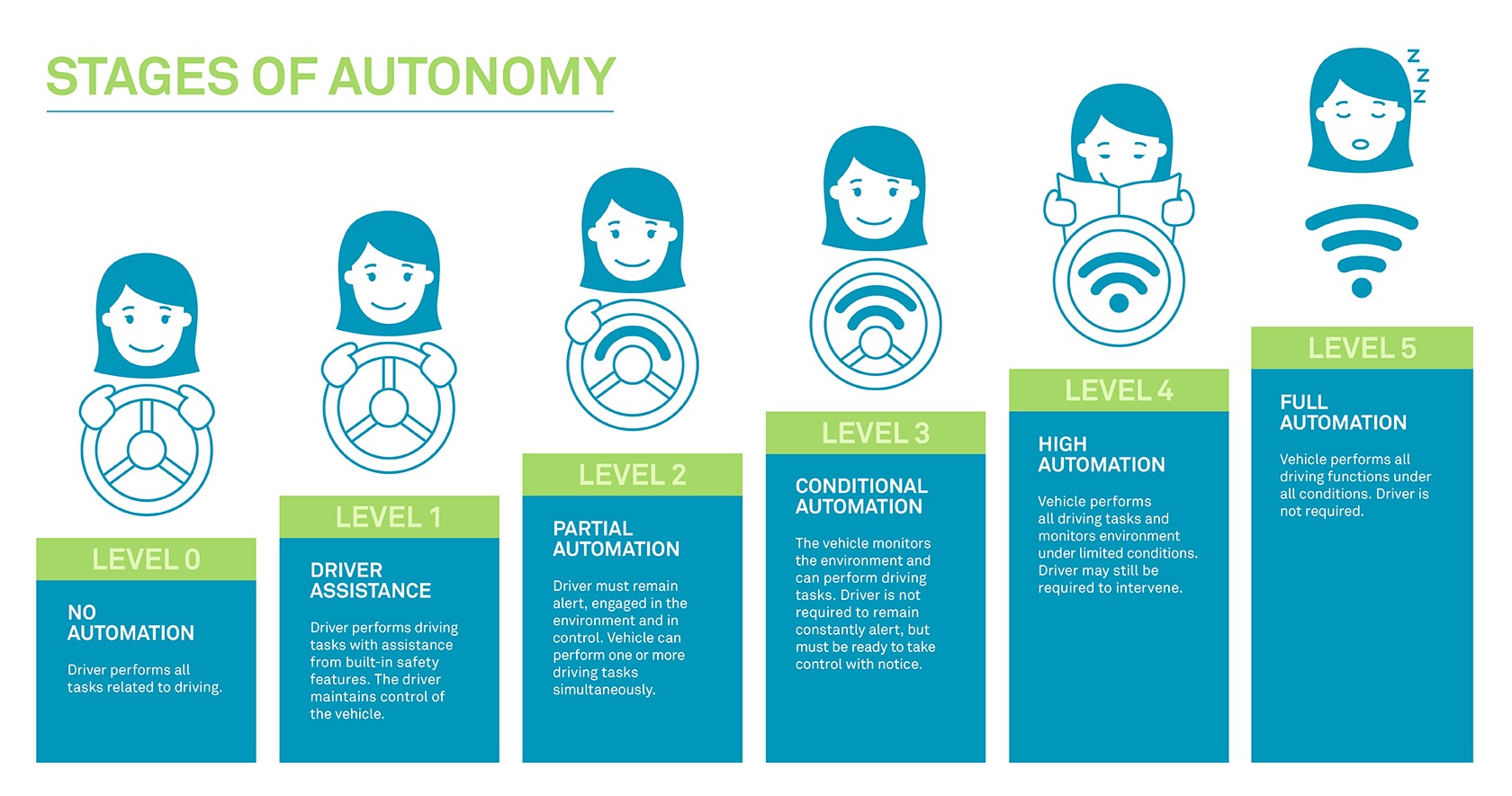
The idea of autonomous vehicles sharing the road is slowly becoming a reality due to advances in positioning and sensor integration. High precision Global Navigation Satellite System (GNSS) technology provides the accuracy, availability and reliability that a vehicle requires to be self-driving.
A fully autonomous vehicle needs an accurate localization solution paired with the confidence that the localization solution is correct. Our GNSS technology is capable of providing decimeter-level accuracy to ensure a vehicle stays in its lane or a safe distance from other vehicles.
Our technology solutions for autonomous vehicles include GNSS receivers that use multiple frequencies and multiple GNSS constellations, Synchronous Position Attitude and Navigation (SPAN) technology, GPS Anti-Jam technology and interference mitigation, and correction services to provide the positioning and sensor integration that autonomous vehicles need.
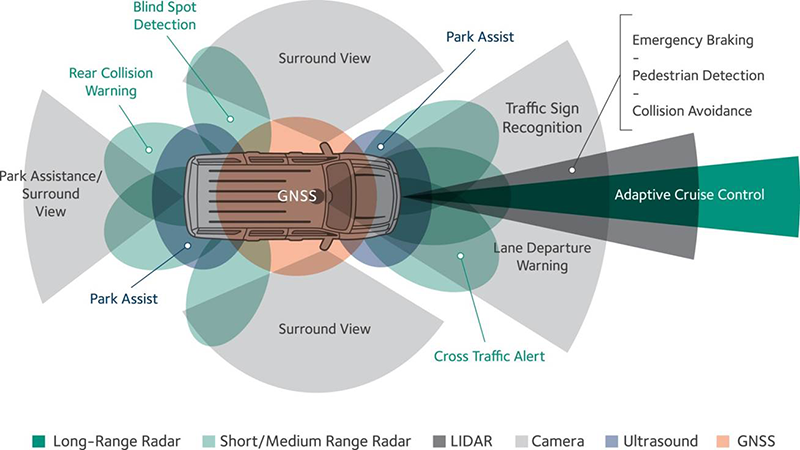
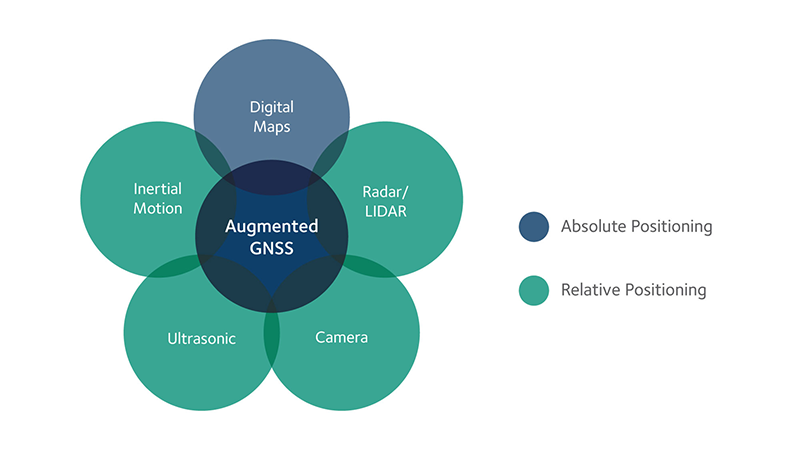
Components like radar, LiDAR and cameras are used to provide the distance to objects that surround the vehicle. If the exact location of the surrounding objects is known, this technology can provide the absolute vehicle location with assistance from a high amount of map data. When integrated with complimentary technology such as: ultrasonic, inertial motion, digital maps, radar/LiDAR and cameras, GNSS acts as the sixth sense to deliver the positioning performance required by autonomous vehicles.
Many technologies onboard vehicles provide local or relative localization. GNSS provides an absolute localization solution, and with the following technologies can achieve the accuracy and availability requirements of a full autonomous driving solution.
With the growing developments in automotive technology, the need for accurate, reliable and robust ground reference has emerged. Global Navigation Satellite Systems (GNSS) + Inertial Navigation Systems (INS) are an essential component of achieving high accuracy ground truth, mobile mapping and real-time precise positioning for autonomy. NovAtel delivers SPAN® GNSS+INS technology in easy-to-integrate packages designed to determine truth trajectories and benchmark your autonomous solution.
High Rate Data:
Users have access to high-rate, smooth solutions, essential for high-speed freeway/highway driving.
Accuracy and Flexibility:
When combined with Real-Time Kinematic (RTK) corrections and post-processing, SPAN offers the best possible solution even through tunnels and ultra-challenging urban canyon situations. Flexibility of the system allows for the addition of a wheel sensor and other external inputs to further refine your solution.
Hardware Robustness:
Internal logging and multiple communication interfaces allow for customized utilization and flexibility when integrating into test vehicles.
The Interference Toolkit (ITK) provides the functionality to monitor, quantify and remove those unintentional interference sources that impact receiver performance. ITK has built-in features to pre-survey demonstration sites, scan for possible interference sources within the vehicle and remove interference.
1. Spectrum analysis output:
Plot signal levels on the vertical axis over a range of frequencies on the horizontal axis. The spectral analysis tools show how much signal power is being sensed across the different GNSS frequency bands. When an interference signal is present it can be visualized in the spectral analysis plot.
2. Advanced signal processing and digital filtering:
Mitigate and remove interference with built-in software, applied signal processing and digital filters. These processing techniques suppress interference, allowing the GNSS signals to track and the receiver to continue to operate normally.
Waypoint Software provides an ideal solution for applications that require accurate post-mission position, velocity or attitude. Post-processing with Waypoint maximizes the accuracy of the ground truth trajectory by processing forward and reverse in time, backsmoothing and combining the results. It provides the ability to assess the solution reliability and accuracy with extensive quality analysis and plotting tools.
GNSS signals, without corrections, provide positioning accuracy of five to ten meters (16-32 feet). Corrections can be generated by a number of sources or methods, and system developers must choose the corrections method that best meets the demands of their application.
Corrections work in combinations with multi-frequency measurements from the GNSS to provide sub-decimeter to centimeter-level accuracy – depending on the correction source.
Precise time is critical for autonomous driving applications. With the PTP functionality provided on OEM7 receivers from Hexagon | NovAtel, you can achieve timing synchronisation for system networks, enabling a trusted timing source for all devices on your platform. Up to 20 devices can be synchronised using a local Ethernet network to <5 ns accuracy, eliminating the need for many hardwired connections. Learn more about how PTP works here.
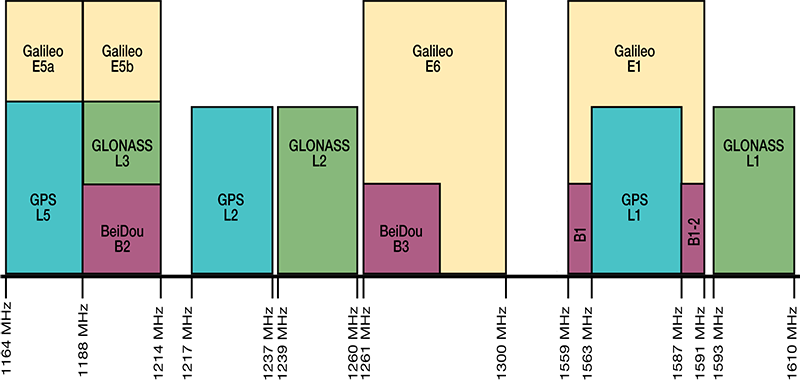
In order to receive the best possible accuracy, it is recommended that two or three frequencies broadcasted by each GNSS constellation (GPS, GLONASS, BeiDou and Galileo) be used.
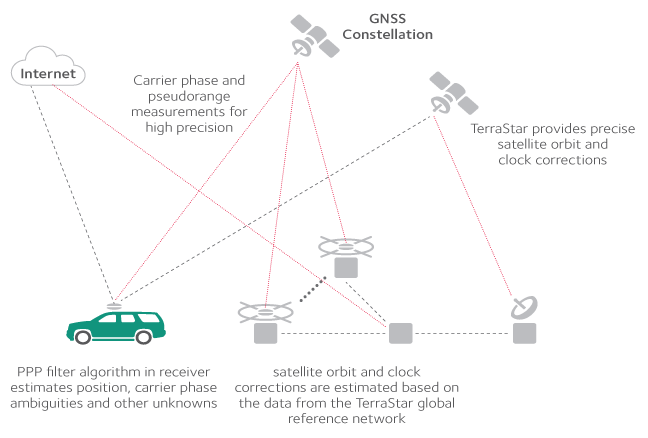
PPP uses globally available corrections using a world-wide network of reference receivers. Corrections are transmitted to the vehicle via satellite or by cellular. NovAtel utilizes TerraStar corrections to deliver a sub-decimeter solution. For more information visit the Positioning Services tab.
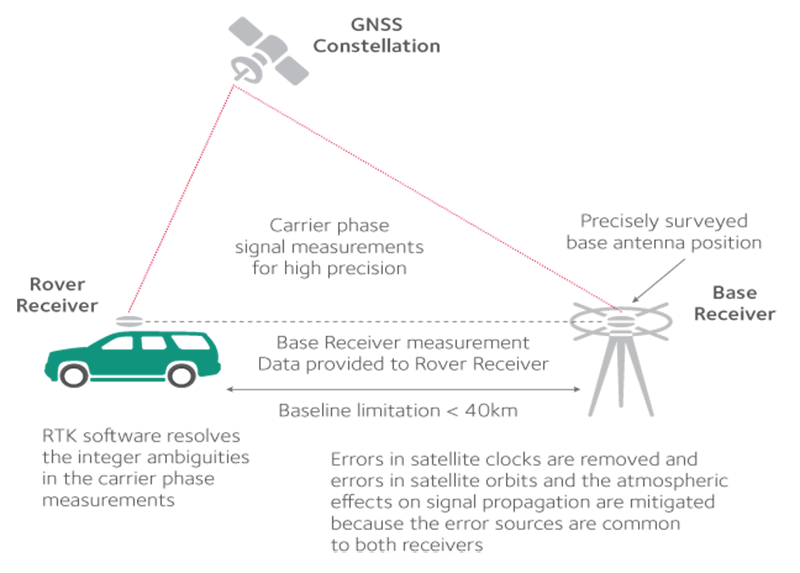
RTK sends data from reference receivers in the vicinity of the vehicle. Location can be covered by one or more RTK networks, available free of charge or for a subscription fee.
We offer precise positioning solutions for ground truth systems, platform development or serial production development stages for Autonomous driving and ADAS technology.
Optimizes SPAN performance in fixed wheel land vehicle applications.
Our correction services deliver the global accuracy and reliability that standalone GNSS is unable to achieve in automotive applications.
The NovAtel_OEM7_driver, built for ROS, is developed and maintained by NovAtel to allow quick and easy integration of the OEM7 receiver into any ROS application.